程序资料物件 (PDO,Process Data Object) 属于一种周期性的资料物件,它可用来在每个 EtherCAT 通讯周期(通常为 1 豪秒)于 EtherCAT 主站 (KINGSTAR Runtime) 与 EtherCAT 从站(驱动器与 IO)间进行交换,主站可透过程序资料交换 (Process Data Exchange) 来监控从站装置。
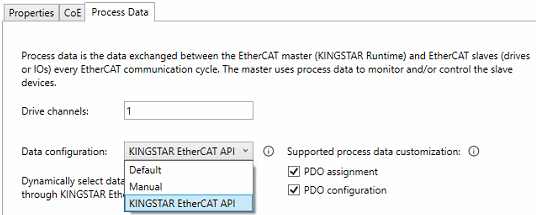
KINGSTAR ESI 汇入工具可供用户为装置选择所需的程序资料配置类型以进行程序资料交换,共有四种类型:预设 (Default)、手动 (Manual)、存取模式 (Access Mode) 及 KINGSTAR EtherCAT API。
• 预设:
- 使用装置中的 ESI 档所指定的预设 PDO 组合进行程序资料交换。
- 选择此配置类型的条件:无
- 设定方式:
- 于资料配置 (Data configuration) 下拉选单选择预设 (Default),装置预设的 PDO 及其相关的变数(资料项目)即显示在下方。此装置将使用预设 PDO 组合进行程序资料交换。
注意:一般而言,当您选择了预设类型时就无需编辑变数。但是,若您发现预设变数不正确时,您即可勾选启用编辑 (Enable editing) 以编辑变数。点击新增 (Add) 按钮新增所需的变数;点击编辑 (Edit) 按钮以编辑该变数;或点击删除 (Delete) 按钮将该变数移除。
• 手动:
- 手动选择 PDO 及其包含的变数以进行资料交换,可选的变数取决于 PDO 属性以及装置所支援的 PDO 配置 与 PDO 资料项目配置。
- 选择此配置类型的条件:装置需支援 PDO 配置 与 PDO 资料项目配置。
- 设定方式:
- 于资料配置 (Data configuration) 下拉选单选择手动 (Manual),KINGSTAR ESI 汇入工具会自动侦测该装置可用的 PDO 及其相关的变数(资料项目),并显示在下方。
- 于输入 PDO (Input Process Data Objects) 或输出 PDO (Output Process Data Objects) 栏位里,将状态 (Status) 开关开启或关闭以启用或停用该 PDO 进行程序资料交换;接著点击新增 (Add) 按钮新增所需的变数;点击编辑 (Edit) 按钮以编辑该变数;或点击删除 (Delete) 按钮将该变数移除。
注意:若您的装置支援 PDO 配置,您可选择 PDO;若您的装置支援 PDO 资料项目配置,您可编辑变数。更多关于在手动模式设定 PDO 的详细步骤请见:客制化设备的程序资料。
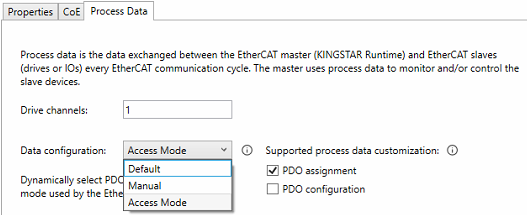
• 存取模式:
- 允许使用者为不同的 KsAccessMode 选择不同的 PDO 组合以进行资料交换。
- 选择此配置类型的条件:
- 装置需支援 PDO 配置,但不支援 PDO 资料项目配置。
- 装置需为驱动器(不可为 I/O)。
- 设定方式:
- 于资料配置 (Data configuration) 下拉选单选择存取模式 (Access Mode),KINGSTAR ESI 汇入工具会自动侦测该装置可用的 PDO 及其相关的变数(资料项目),并显示在下方。
- 欲选择 PDO,于输入 PDO (Input Process Data Objects) 或输出 PDO (Output Process Data Objects) 栏位里,针对各 KsAccessMode (P、V、T、PV、VP、PVT、VPT) 勾选所需的 PDO 以进行程序资料交换。
注意:一般而言,您无需(也不允许)编辑变数。倘若变数有误,您可勾选启用编辑 (Enable editing),接著于 PDO 清单上点选一个 PDO,其相关的变数会显示在下方,您可点击新增 (Add) 按钮新增所需的变数;点击编辑 (Edit) 按钮以编辑该变数;或点击删除 (Delete) 按钮将该变数移除。
• KINGSTAR EtherCAT API:
- 透过呼叫 KINGSTAR EtherCAT API 自动选择变数(资料项目)以进行程序资料交换。
- 选择此配置类型的条件:
- 装置需支援 PDO 资料项目配置。
- 装置需为驱动器(不可为 I/O)。
- 设定方式:
- 于资料配置 (Data configuration) 下拉选单选择 KINGSTAR EtherCAT API,KINGSTAR ESI 汇入工具会自动辨识装置可用的变数(资料项目)。
- 使用以下 KINGSTAR API 以编辑变数:
- SetAxisAccessMode:您可选择一种 KsAccessMode,KINGSTAR 将自动配置相应的变数。KINGSTAR Runtime 将根据您选择的 KsAccessMode 决定是否将目标位置/速度/扭矩及实际位置/速度/扭矩变数加入程序资料交换,请注意,仅当设备支援所选 KsAccessMode 所需的变数时,关联的 McControlMode 才可被使用。
- 轴变数:除了 KINGSTAR 为各 KsAccessMode 自动配置相应的变数外,您亦可使用轴变数 API 将所需的变数加入程序资料交换。注意:请确认您的装置有支援欲加入的变数。
针对 .NET Class,请参阅 ISubsystem 属性(如 ActualCurrent;ActualVelocity)。
注意:显示字体为黑色的变数表示驱动器支援该变数;显示字体为灰色的变数表示驱动器不支援该变数,即使使用相关的 KINGSTAR API 将该变数加入,该变数也无法进行程序资料交换。
注意:您亦可使用 KINGSTAR 设定工具选择 KsAccessMode 及轴变数,请参阅 连接设定 > 轴设定 (Axis Settings)。
KINGSTAR 支援的程序资料变数说明
KINGSTAR ESI 汇入工具会自动侦测装置所支援的程序资料变数,并将 KINGSTAR 所支援的程序资料变数显示在 输入资料 (Input Data) 与 输出资料 (Output Data) 栏位中。
输入资料(变数由从站传送至主站):

Status word:驱动器的状态。状态有 "未准备好开启 (not ready to switch on)"、"开启已停用 (switch on disabled)"、"开启就绪 (ready to switch on)"、"已开启 (switched on)"、"操作启用 (operation enabled)"、"快速停止起启用中 (quick stop active)"﹑"错误反应用中 (fault reaction active)" 或 "错误 (fault)"。
Actual position:实际位置。
Actual velocity:实际速度。
Actual torque:实际扭矩。
Actual current:实际电流。
MOP display:操作模式显示变数的值,操作模式可为 CSP (Cyclic Synchronous Position)、CSV (Cyclic Synchronous Velocity)、CST (Cyclic Synchronous Torque) 等等。
Drive digital inputs:驱动器的数位输入。
Touch probe:驱动器的位置抓取针状态。
Secondary encode:如果机器上有两个编码器,从第二个编码器取得位置。
Following error:跟随误差。
Probe positive edge:位置抓取针上升边缘后锁存的位置值。
Probe negative edge:位置抓取针下降边缘后锁存的位置值。
Custom input 1:使用者定义的物件,此物件必须存在于装置物件字典。
Custom input 2:使用者定义的物件,此物件必须存在于装置物件字典。
输出资料(变数由主站传送至从站):
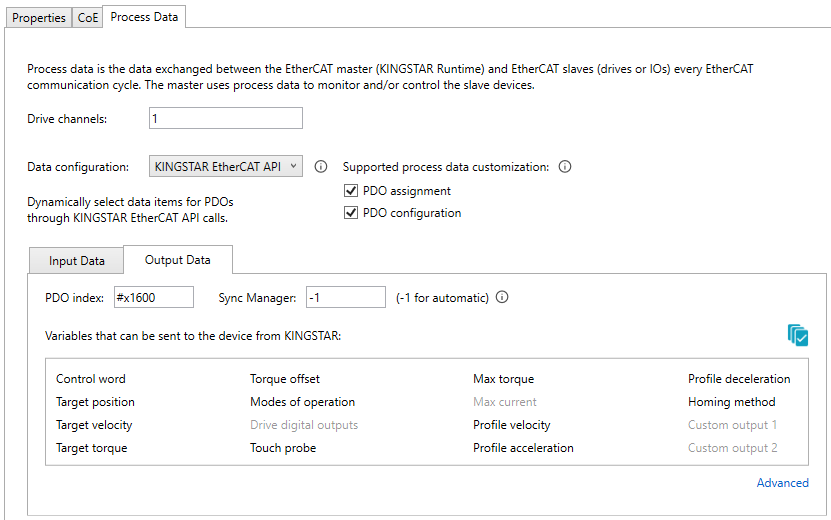
Control word:此物件用来设定驱动器的模式,模式可透过 Status word 读取。
Target position:命令位置。
Target velocity:命令速度。
Target torque:命令扭矩。
Torque offset:扭矩位移,在扭矩模式使用。
Modes of operation:此物件用来设定驱动器的操作模式,可由 MOP 显示读取。
Drive digital outputs:驱动器数位输出。
Touch probe:传送位置抓取命令。
Max torque:最大扭矩。
Max current:最大电流。
Profile velocity:曲线速度。
Profile acceleration:曲线加速度。
Profile deceleration:曲线减速度。
Homing method:原点赋归方法。
Custom output 1:使用者定义的物件,此物件必须存在于装置物件字典。
Custom output 2:使用者定义的物件,此物件必须存在于装置物件字典。
功能/API 与变数关系表
下表列出各功能 / API 需使用到的变数,供您参考。
| 功能 / API | 所需程序资料变数 |
|---|---|
|
Target position |
|
|
Target velocity |
|
|
Target torque Actual torque |
|
|
Control mode switching while powered on, |
MOP display Modes of operation |
|
Touch probe (input: status) Touch probe (output: control) Probe positive edge Probe negative edge |
|
|
Drive digital inputs |
|
|
Drive digital outputs |
|
|
Actual current |
|
|
Actual torque |
|
|
Actual velocity |
|
|
Second Position |
|
|
Following error |
|
| Torque offset | |
|
Max torque |
|
|
Max current |
|
|
Profile velocity |
|
|
Profile acceleration |
|
|
Profile deceleration |
|
专有名词说明
-
程序资料交换 (Process Data Exchange):
每个 EtherCAT 通讯周期(通常每个周期为 1 毫秒)于 EtherCAT 主站 (KINGSTAR Runtime) 与 EtherCAT 从站(驱动器或 IO)间进行程序资料交换,包括输入资料(资料由从站传送至主站)和输出资料(资料由主站传送至从站)。
-
PDO (Process Data Object):
程序资料物件。每个程序资料物件都含有一组资料项目(PDO entry)可供选择,以进行程序资料交换,某些装置会使用固定的 PDO(无法修改 PDO 中的资料项目)或强制某些 PDO 必须进行程序资料交换。
-
装置所支援的 PDO,可供使用者选择以进行程序资料交换。
-
PDO 资料项目配置 (PDO Configuration):
PDO 中的资料项目,可供使用者选择以进行配置。
-
KINGSTAR EtherCAT API:
KINGSTAR 提供许多 EtherCAT 相关的 API,其中会影响到可选的程序资料项目的 API 为 轴变数。针对 .NET Class,请参阅 ISubsystem 属性(如 ActualCurrent, ActualVelocity)。
参见